Firmware test automation using real embedded devices
Markus Tacker

Agenda
- Project and (Testing) Goals
- Problems and Solutions
- Learnings and Benefits
The project
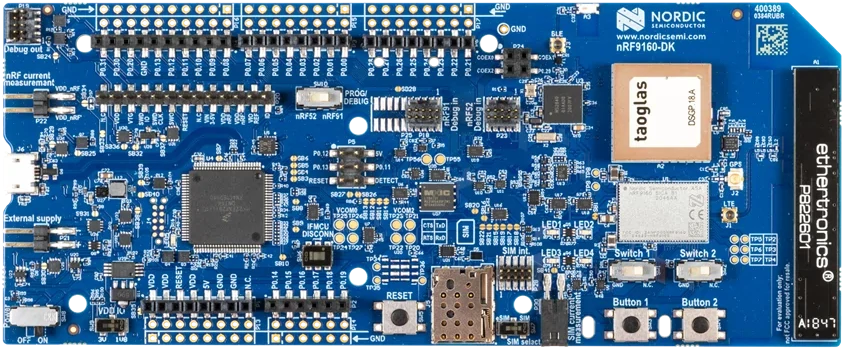
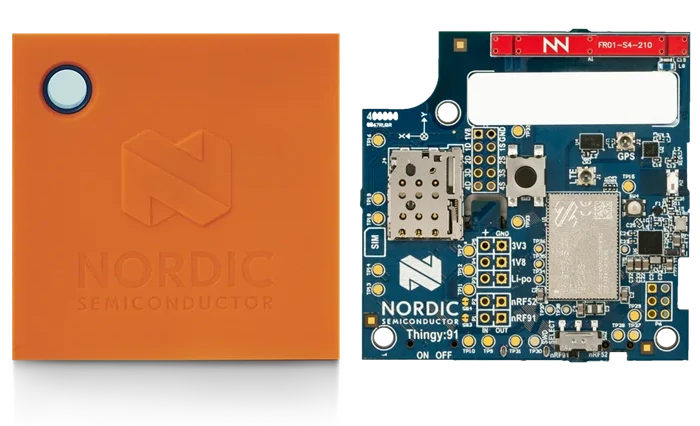
In 2019, I joined a team working on open-source firmware sample using two development kits for cellular IoT.
Development Kits
🌩️
I am responsible for demonstrating to our customers what they need on the cloud side.
System overview
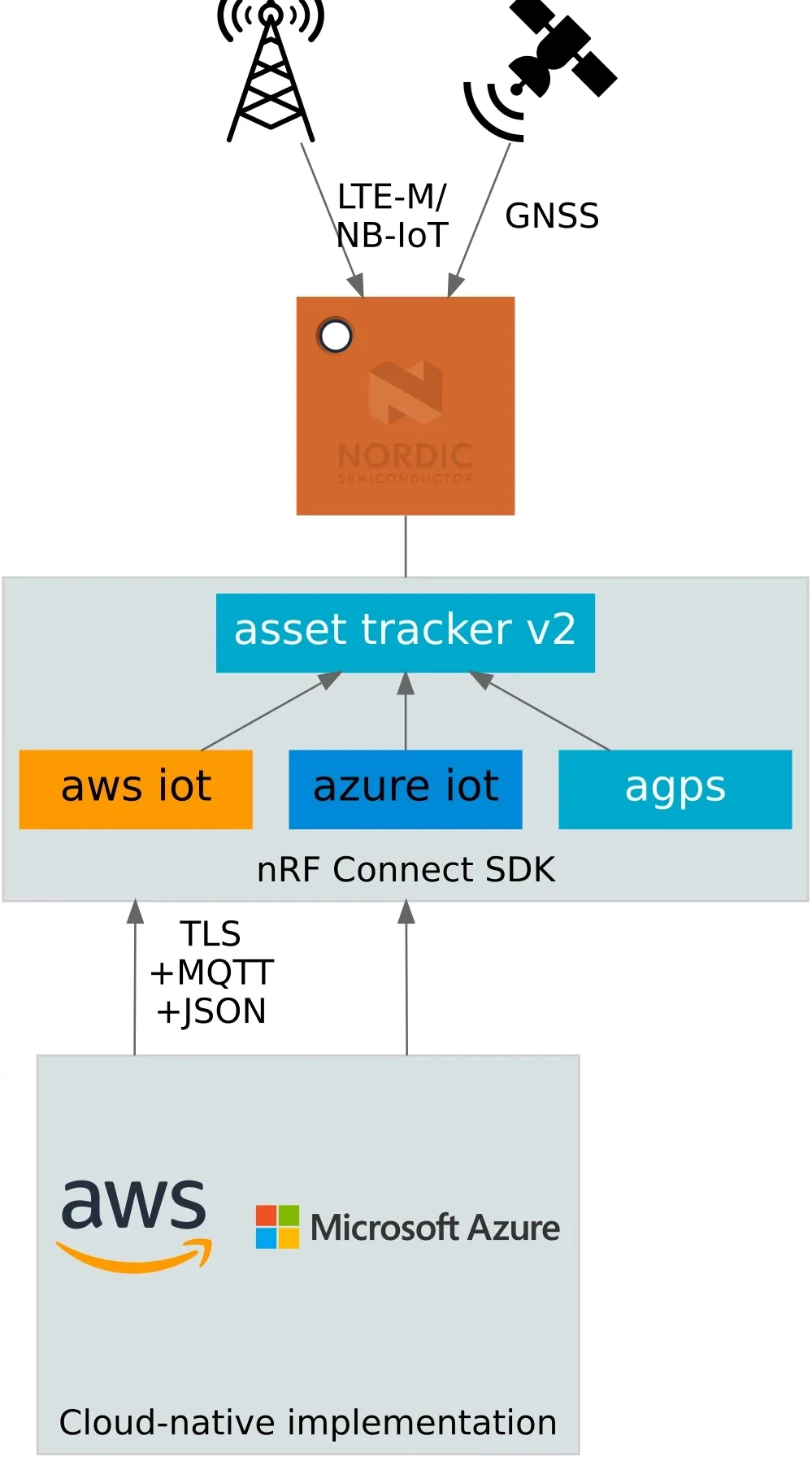
Let’s take the customer’s perspective
This talk is my personal opinion, and does not represent the views of my employer.
Needs
- Ensure that cloud backend and firmware application work together for every commit.
- Provide up-to date firmware for testing (endpoints need to be hardcoded) and automated releases.
2 hardware targets × 3 debug levels × 4 files = 24 artifacts / change
QA resources closed-source
Firmware build pipeline for the open-source sample applications is closed source.
Pipeline to run tests is closed source, too.
My Goals
Test firmware automatically for every change.
because Continuous Delivery solves all your problems
(don’t trust me, read Accelerate)on GitHub Actions
(so others can see, copy, adapt, improve)more robust products = more $$$
(and we don’t want to end up on @internetofshit).
Accelerate
@internetofshit
Problems and Solutions
Problem #1
Setting up system for building firmware in the SDK is only documented as a manual process.
Solution: Docker
I’ve created a Docker image that provides all required dependencies.
- Nightly tests which build firmware application
- Generalized for all firmware samples and applications in the SDK (so others can re-use)
GitHub Actions <3 Docker
GitHub Actions support Docker, so I can now build firmware from the SDK automatically!

Warning: Docker is not deterministic!
If you are using this approach you must be aware that you are using software from many untrusted sources with all the consequences that brings.
- Docker images are not deterministic. At build time, dependencies are fetched from third-party sources and installed. These dependencies could also contain malicious code.
- The entire image creation and publication is automated (build on GitHub Actions, and served by Dockerhub), which means there are multiple systems that can be compromised, during and after publication.
- Through automation we only ensure that the application can be build.
Problem #2
The SDK is a monorepo with a slow release cycle (months).
- The firmware application sample I am interested in is in a sub folder, but we want to out-of-tree development model: SDK as a dependency, not a fork.
- Has configuration for multiple cloud backends, but I am only interested in one.
- We want a short release cycle (hours—days).
Solution: out-of-tree copy of subfolder
Use GitHub Actions to copy subfolder into seperate repository.
- Takes customers/users perspective.
- Pulls in SDK as a dependency.
- One repo per cloud-provider (AWS, Azure, …)
- cloud abstraction to support multiple cloud backends is not used by customers in practice.
- Introduces semantic release on commit (not done in the SDK release process), because CONTINUOUS DELIVERY!
Problem #3
Can’t use emulation (e.g. running in QEMU).
- removes entire network stack, so tests do not cover huge problem surface.
A lot of problems during testing are because of connection issues (TLS):
- certificates
- hostname(s)
- provisioning on the cloud side
Solution: run on real hardware

Workflow in GitHub Actions
- Commit to repo triggers a GitHub Actions workflow
- Compile firmware for test
- Create credentials for device
- Flash the firmware and credentials to the test board
- Firmware boots, and (hopefully) connects to cloud
- Test runner schedules FOTA
- Test runner observes device activity (UART and in cloud) until success state reached, or timeout / error occurs
Compile firmware for test
Runs on a GitHub runner, pulls Docker image and compiles the firmware. HEX file is stored as artifact.
Source
docker run --rm -v ${PWD}:/workdir/project nordicplayground/nrfconnect-sdk:main \
/bin/bash -c '\
cd firmware && \
west init -l && \
west update --narrow -o=--depth=1 && \
west build -p always -b ${{ matrix.board }} -- \
-DOVERLAY_CONFIG="overlay-aws.conf;overlay-pgps.conf;overlay-debug.conf;asset-tracker-cloud-firmware-aws.conf;firmware.conf" \
-DEXTRA_CFLAGS="-Werror=format-truncation"\
'Create credentials for device
Runner creates a certificate for a device with a unique and random name.
Repository has intermediate CA certificate, which can be used to create device certificates.
Certificate is stored as artifact (so it can be accessed by other jobs later).
Flash the firmware and credentials to the test board
On a self-hosted runner, with a development kit attached, the firmware and the certificates are flashed onto the development kit.
- Started with RaspberryPI (ARM64 is supported by Segger)
- Now Ubuntu on an Intel NUC (more enjoyable to work with)
Power cycle!
There are all kinds of reasons why devices crash, so turning it on and off again is needed (power cycle).

Firmware boots, and (hopefully) connects to the cloud
********************************************
The Asset Tracker v2 has started
Version: 67bcbead-original
Client ID: a11d8e1b-9751-4036-9deb-0ed875c1ded2
Cloud: AWS IoT
Endpoint: abcdef12345678-ats.iot.eu-west1.amazonaws.com
********************************************Test runner schedules FOTA
The test runner waits for the device to connect to the cloud (until it writes to its shadow), then schedules a FOTA.
# Device has connected and reported device information.
<dbg> aws_iot_integration: aws_iot_event_handler: AWS_IOT_EVT_CONNECTED
# FOTA job "db572411-d7da-4c32-8f0c-5684e84c9242" created.Device downloads FOTA image
<inf> download_client: Downloading: a11d8e1b.bin [0]
<dbg> ui_module: state_set:
State transition STATE_RUNNING --> STATE_FOTA_UPDATING
<inf> download_client: Downloaded 1024/286472 bytes (0%)
...
<inf> download_client: Downloaded 286472/286472 bytes (100%)
<inf> download_client: Download completeDevice flashes FOTA image and reboots
<dbg> STREAM_FLASH: stream_flash_erase_page: Erasing page at offset 0x000ef000
<inf> dfu_target_mcuboot: MCUBoot image-0 upgrade scheduled.
Reset device to apply
<inf> app_event_manager: MODEM_EVT_SHUTDOWN_READY
<err> util_module: Rebooting!
I: Starting bootloader
I: Primary image: magic=unset, swap_type=0x1, copy_done=0x3, image_ok=0x3
I: Secondary image: magic=good, swap_type=0x2, copy_done=0x3, image_ok=0x3
I: Boot source: none
I: Swap type: test
I: Bootloader chainload address offset: 0x10000
I: Jumping to the first image slot
*** Booting Zephyr OS build 186cf4539e5a ***Device reports new version to the cloud
********************************************
The Asset Tracker v2 has started
Version: 67bcbead-upgraded
Client ID: a11d8e1b-9751-4036-9deb-0ed875c1ded2
Cloud: AWS IoT
Endpoint: abcdef12345678-ats.iot.eu-west1.amazonaws.com
********************************************Observe device activity
Using UART we can immediately react on device output.
<endOn> Termination criteria seen: aws_iot_integration: cloud_wrap_init: Version: 67bcbead-upgradedNice, but:
- changes easily (spaces can break assertion)
- UART sometimes gets garbled (USB cables suck)
More hassle, than it’s worth.
Store output, but don’t depend on it for testing.
Treat device as black box: observe outcome on cloud side.
Test successfull!
We have now ensured, that
- the device can connect
- reports it’s configuration to the cloud
- handles firmware-over-the-air updates
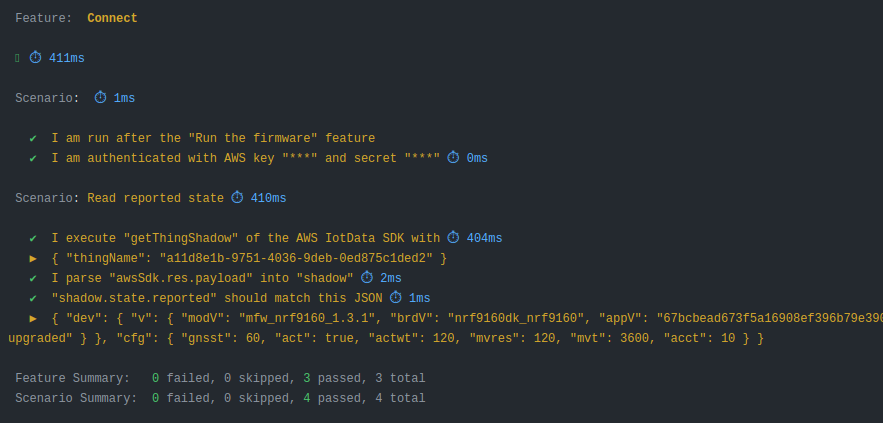
BDD scenario example
Tests are describe in BDD scenarios:
Should we test more?
We could test more, but:
- many things can be covered easier in unit tests
- from the cloud backend perspective connectivity + FOTA is THE critical feature
- firmware application is “intelligent”, takes a lot of effort (hacks) to control it from the outside
Learnings
- The toolchain for embedded devices (that I use) was not designed with automation in mind.
- It’s hard to get it to work.
- It is NOT reproducible.
- Understanding how everything plays together is a massive mindfuck.
- But it IS possible!
Benefits
- end-to-end tests catch issues which are not found in unit testing
- I have discovered critical issues through this black-box testing
- also provides WORKING documentation and tracks changes of how to build firmware applications
Thank you & happy connecting!
Please share your feedback!
m@coderbyheart.com
@coderbyheart
Latest version:
bit.ly/fwtesting
We are hiring!
nordicsemi.com/jobs
Trondheim · Oslo · 20+ more locations